Inhalt
- Highlights 2026 auf einen Blick
- Alle Termine 2026 (Übersicht)
- Januar 2026: Werkstatt-Upgrade, Hydrotower & neuer 3D-Drucker
- März 2026: Maker Faire RheinRuhr & Start Solarrennwagen
- Mai 2026: Solarrennen Wil (voraussichtlich)
- Sommer 2026: Maker Faire Solothurn & Maker Faire Hannover + evtl. Solarrennen Seeland
- Herbst 2026: SolarMobil-Meisterschaft (Zuschauer)
- Streams 2026 (Twitch & YouTube)
Highlights 2026 auf einen Blick
- Januar 2026: Werkstatt-Upgrade + Kickoff „Hydrotower“ + neuer 3D-Drucker
- März 2026: Maker Faire RheinRuhr (als Besucher) + Kickoff Solarrennwagen
- Mai 2026: Solarrennen Wil (voraussichtlich)
- Juni 2026: Maker Faire Solothurn (als Aussteller)
- August 2026: Maker Faire Hannover (als Aussteller) + evtl. Solarrennen Seeland
- September 2026: SolarMobil-Meisterschaft (Zuschauer)
Termine 2026 als schnelle Übersicht
- Januar 2026: Werkstatt-Upgrade / Hydrotower-Kickoff / neuer 3D-Drucker
- 14.–15.03.2026: Maker Faire RheinRuhr (Besucher)
- Mitte März 2026: Solarrennwagen-Kickoff
- vsl. 23.05.2026: Solarrennen Wil (noch nicht bestätigt)
- 20.–21.06.2026: Maker Faire Solothurn (Aussteller)
- 15.–16.08.2026: Maker Faire Hannover (Aussteller)
- evtl. 22.08.2026: Solarrennen Seeland (noch nicht bestätigt / mögliche Überschneidung)
- 26.09.2026: SolarMobil-Meisterschaft (Zuschauer)
Januar 2026: Werkstattstart, Hydrotower & neuer 3D-Drucker
Anfang Januar: Umbau Druckertisch & Vorbereitung
Bevor der neue 3D-Drucker einzieht, bekommt mein Druckertisch ein Upgrade:
- mehr Platz & bessere Ergonomie
- neues Konzept für Filamentlagerung
- saubere Kabelführung
- insgesamt bessere Werkstatt-Organisation
Ziel: effizienter arbeiten und schneller von der Idee zum fertigen Bauteil kommen.
Anfang Januar: Kickoff „Hydrotower“
Direkt zum Jahresstart geht’s los mit meinem nächsten DIY-Projekt: Hydrotower.
Ich werde Schritt für Schritt Einblicke, Tests, Iterationen und Learnings teilen – Details folgen im Blog.
Mitte bis Ende Januar: Ankunft neuer Drucker + erste Tests
Zwischen Mitte und Ende Januar sollte der Drucker ankommen. Dann folgen:
Setup → Kalibrierung → erste Testdrucke → Praxiserfahrungen (inkl. Content dazu).
März 2026: Maker Faire RheinRuhr & Start Solarrennwagen
14.–15.03.2026: Maker Faire RheinRuhr (als Besucher)
Dieses Mal bin ich „nur“ als Besucher dabei – perfekt zum Inspiration sammeln, Projekte checken und Kontakte knüpfen.
Wenn du dort bist: Sag gern Hallo!
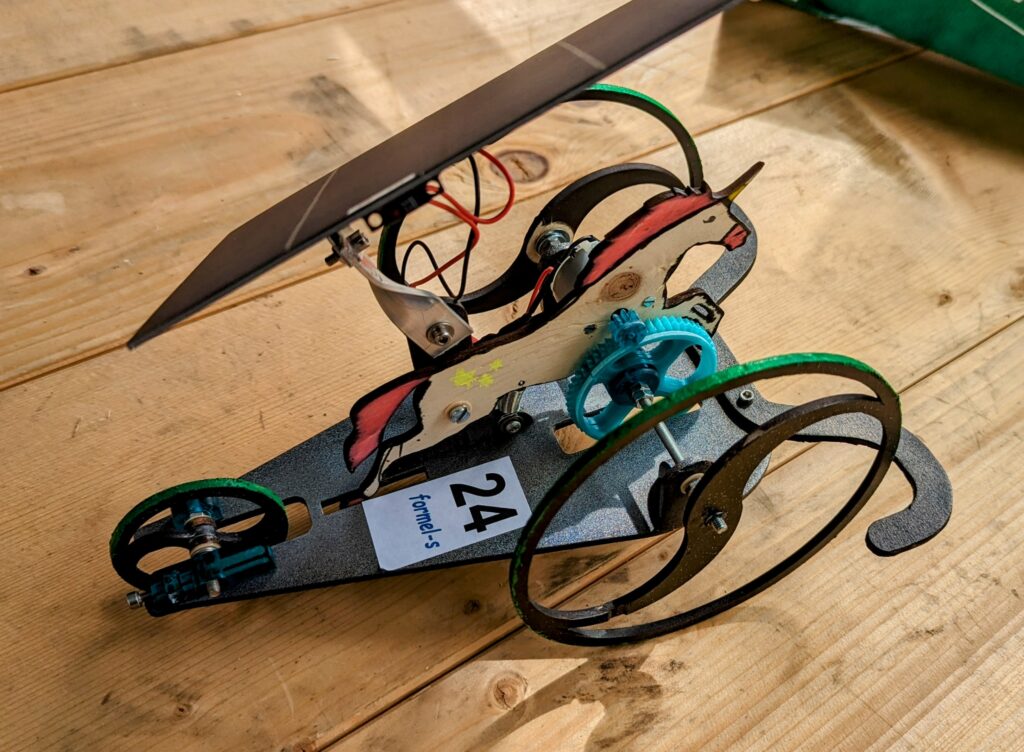
Mitte März: Kickoff Solarrennwagen
Nach der Maker Faire wird’s ernst: Der Solarrennwagen startet offiziell.
Ab dann geht’s ans Planen, Bauen, Testen und Optimieren – mit Fokus auf Effizienz, Gewicht und zuverlässige Technik für spätere Rennen.
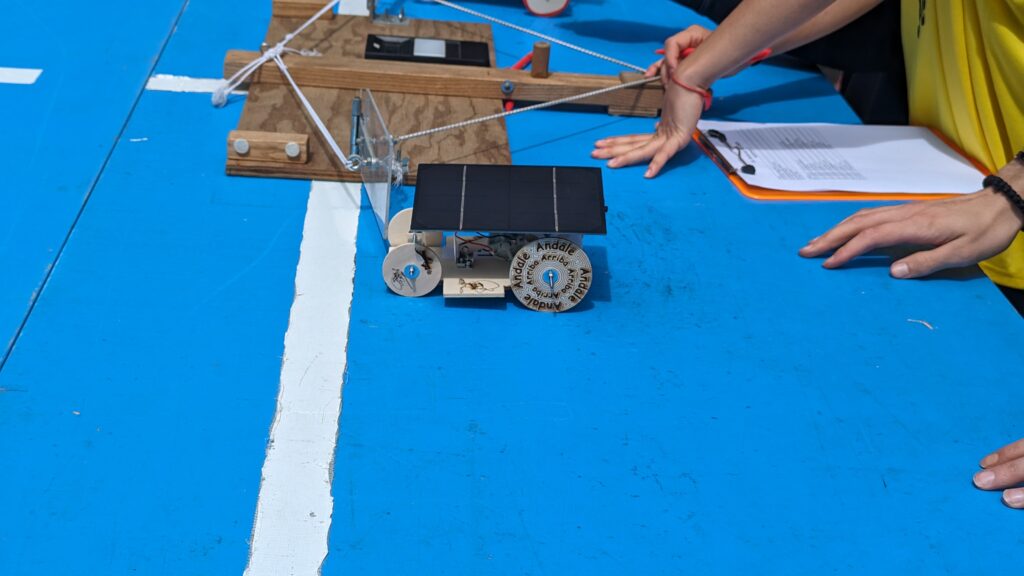
Mai 2026: Solarrennen Wil (voraussichtlich)
Wahrscheinlich 23.05.2026: Solarrennen Wil (Termin noch nicht bestätigt)
Sehr wahrscheinlich steht das Solarrennen Wil 2026 auf dem Plan – das genaue Datum ist aber noch nicht fix. Sobald bestätigt, update ich den Beitrag und Social Media.
Sommer 2026: Maker Faires & Solarrennen
20.–21.06.2026: Maker Faire Solothurn (als Aussteller)
Yes! Ich bin als Aussteller an der Maker Faire Solothurn 2026 dabei.
Komm vorbei – ich freue mich auf Gespräche, Nerdtalk, Feedback und die Community.
15.–16.08.2026: Maker Faire Hannover (als Aussteller)
Im August geht’s weiter zur Maker Faire Hannover 2026 – ebenfalls als Aussteller.
Ein fettes Sommer-Highlight: vormerken lohnt sich!
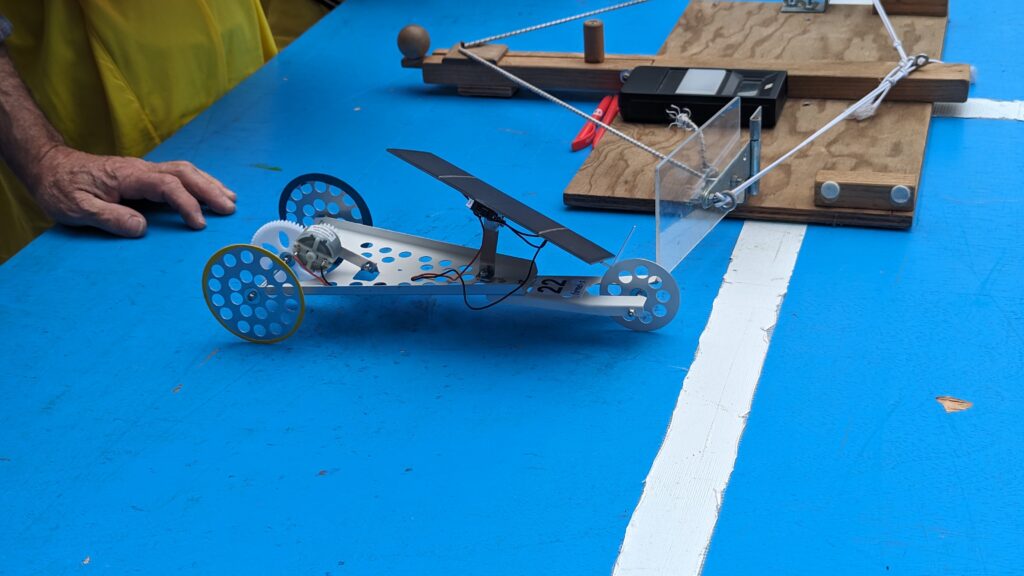
Eventuell 22.08.2026: Solarrennen Seeland (Termin noch nicht bestätigt)
Das Solarrennen Seeland 2026 ist noch unsicher – und könnte sich mit der Maker Faire Hannover überschneiden. Sobald klar ist, was final stattfindet, gibt’s ein Update.
Herbst 2026: SolarMobil-Meisterschaft (Zuschauer)
26.09.2026: Besuch „Meisterschaft SolarMobil“
Manchmal ist Zuschauen die beste Weiterbildung: Projekte analysieren, Ideen mitnehmen, Kontakte pflegen – und einfach das SolarMobil-Feeling geniessen.
Ausblick: Weitere Termine folgen
Das sind aktuell alle Events, die ich bisher für 2026 gesammelt habe. Wenn neue Maker-Termine dazukommen oder sich Daten ändern, ergänze ich die Liste hier im Blog.
Streams 2026: Twitch & YouTube (unregelmässig)
Meine Streams auf Twitch und YouTube bleiben unregelmässig. Oft klappt’s sonntags abends – je nach Projektphase gibt’s aber auch spontane Streams.
✅ Am zuverlässigsten: Folge mir auf Instagram – dort gibt’s Stream-Starts, neue Videos und Event-Updates.
(Instagram-Link/Handle hier einfügen)
Bist du 2026 auf einer Maker Faire dabei – oder baust du selbst ein Solar-Fahrzeug? Schreib’s gern in die Kommentare: Welche Events oder Projekte stehen bei dir an?
Bis bald – in der Werkstatt oder auf einer Maker Faire! 👋