Das neue Jahr steht ganz im Zeichen intelligenter und nachhaltiger Technik-Projekte. Mit meiner Tochter entwickle ich einen smarten Blumentopf – ein perfektes Projekt, um Kinder für Technik zu begeistern.
Unser Solarrenner wird pünktlich zur Rennsaison im Mai einsatzbereit sein. Parallel arbeite ich am SelfBalanceRobot V2, der einige spannende Verbesserungen verspricht.
Events 2025
Die Schweizer Solarrennen-Serie steht fest in meinem Kalender. Als Aussteller werde ich auf der Maker Faire Hannover (23.-24. August) vertreten sein. Die Maker Faire Solothurn (28.-29. Juni) besuche ich definitiv – vielleicht sogar als Aussteller, lasst euch überraschen!
Verfolgt unsere Fortschritte hier im Blog. 2025 wird ein spannendes Maker-Jahr!
Ich möchte euch von meinem neuesten DIY-Projekt erzählen: dem Bau eines selbstbalancierenden Robotergeists aus einem alten Hoverboard. Dieses Upcycling-Projekt ist perfekt für alle Technikbegeisterten, die sich inspirieren lassen wollen und Spaß daran haben, alten Dingen neues Leben einzuhauchen.
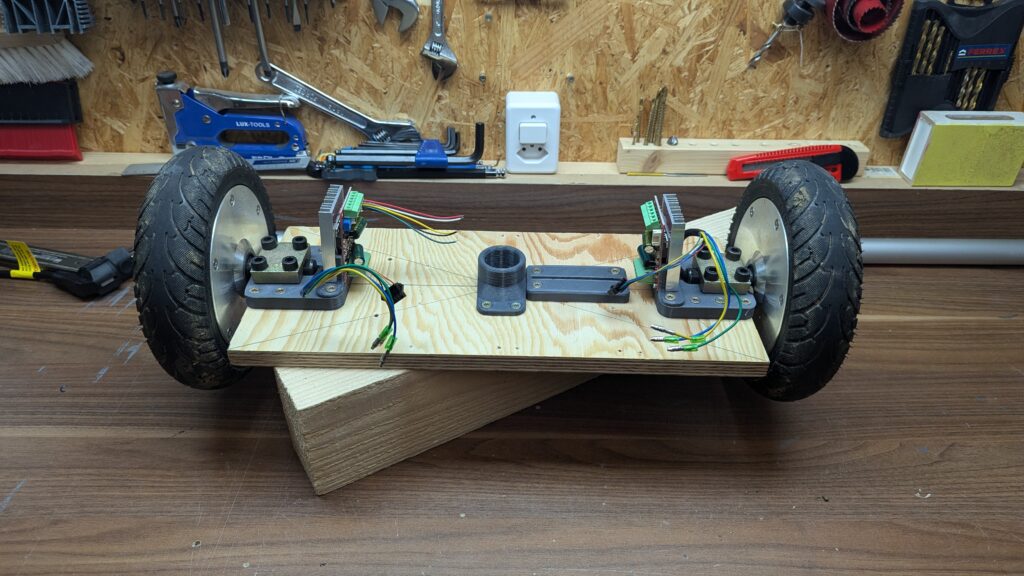
Alles begann damit, dass ich ein altes Hoverboard zerlegt habe. Die Motoren und der Akku waren ideal für mein Vorhaben. Die restliche Elektronik habe ich sicher eingelagert – man weiß ja nie, wann man sie wieder gebrauchen kann. Mit Fusion 360 habe ich das Design für den Robotergeist erstellt. Das CAD-Programm ermöglichte es mir, sowohl das Gehäuse als auch den Kopf des Geists genau nach meinen Vorstellungen zu gestalten.
Die gedruckten Teile aus PETG-Filament habe ich mit meinem FDM-3D-Drucker hergestellt. PETG ist robust und eignet sich hervorragend für Projekte, die Stabilität erfordern. Mit Hilfe von Holzbearbeitungswerkzeugen habe ich zusätzliche Anpassungen vorgenommen und alle Teile zusammengefügt. Die Verkabelung der Komponenten, darunter der ESP32 Mikrocontroller, der MPU6050 Sensor und der ZS-X11H V1 Motortreiber, war der nächste Schritt. Ein 3.3V zu 5V Level Shifter kam zum Einsatz, um die unterschiedlichen Spannungsanforderungen der Bauteile zu berücksichtigen.
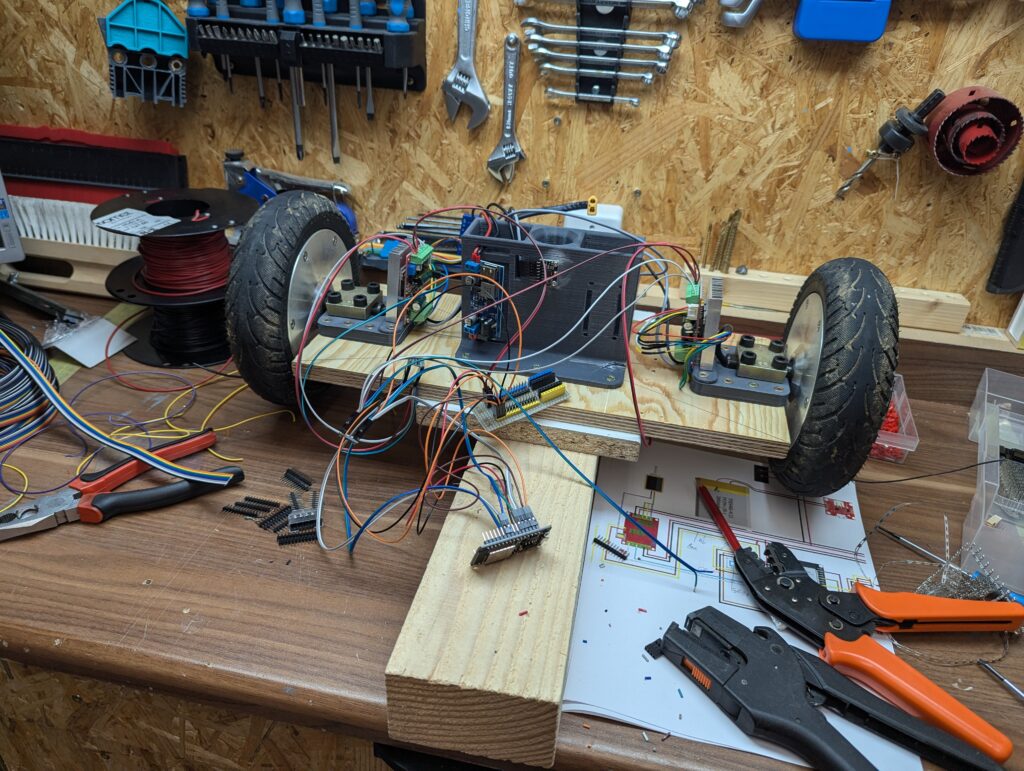
Die ersten Tests verliefen nicht ohne Probleme. Beim initialen Versuch habe ich zwei Motortreiber zerstört – ein klassischer Fall von „Versuch und Irrtum“. Doch davon ließ ich mich nicht entmutigen. Ich überarbeitete die 3D-Modelle, druckte einige Teile neu und passte die Konstruktion an. Mit Visual Studio Code und PlatformIO begann ich, die Software für den Roboter zu entwickeln. Ziel war es, dass der Robotergeist selbstständig das Gleichgewicht hält und eventuell sogar gesteuert werden kann.
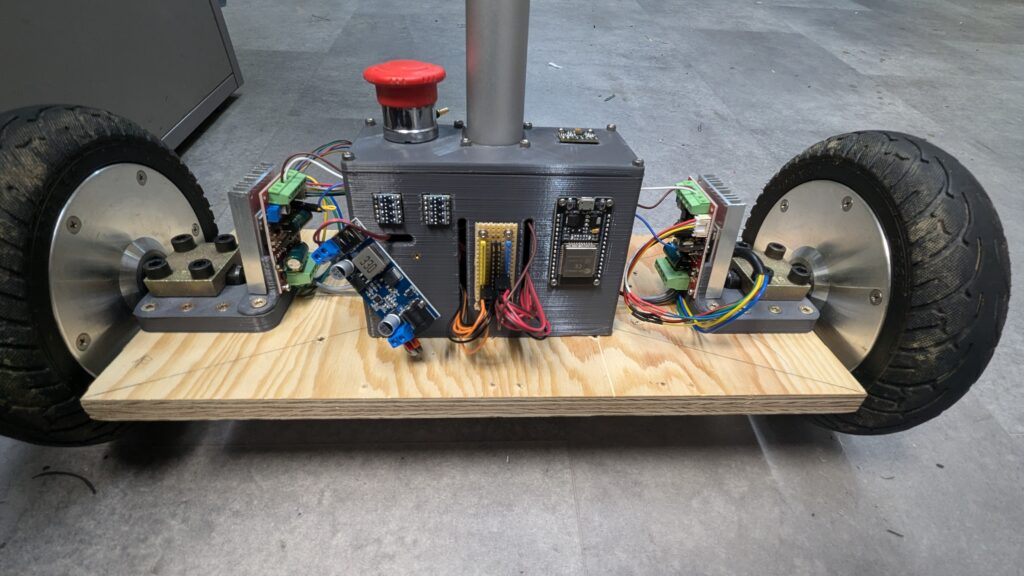
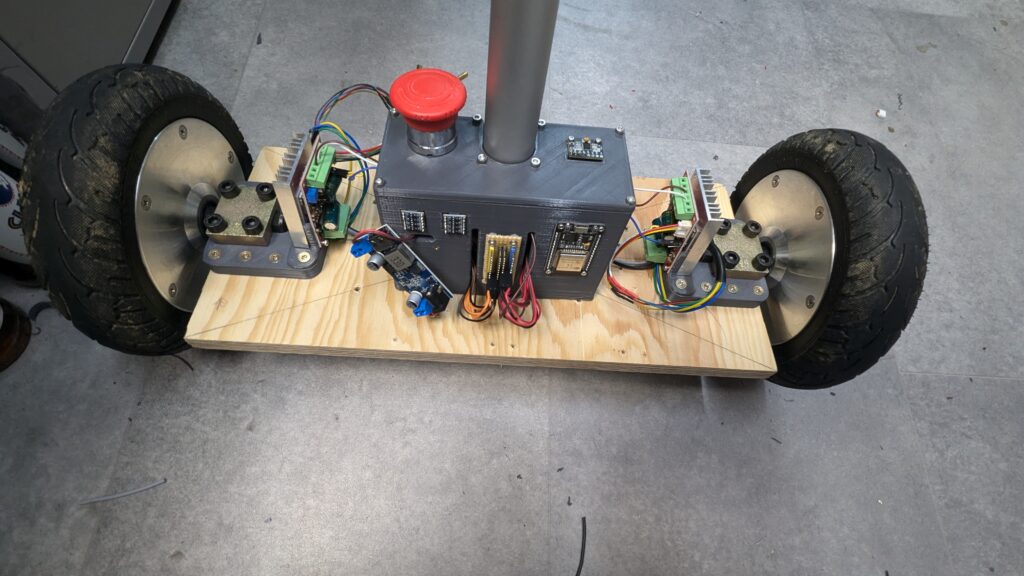
Der Kopf des Geists, ebenfalls in Fusion 360 entworfen und gedruckt, verleiht dem Roboter nicht nur sein charakteristisches Aussehen, sondern dient auch als zusätzliches Gewicht für ein besseres Balancieren. Nach einigen Anpassungen und Optimierungen balancierte der Roboter tatsächlich recht gut. Die Freude war groß, doch zwei Tage vor Halloween kam der nächste Rückschlag: Beim Einbinden der Hallsensoren in den Regelkreis ging aus ungeklärter Ursache ein Motortreiber kaputt. Ersatzteile hatten eine Lieferzeit von vier bis sechs Wochen, sodass das Projekt für Halloween leider nicht mehr fertiggestellt werden konnte.
Trotz dieser Hindernisse habe ich viel aus dem Projekt gelernt. Ich habe festgestellt, dass das Platzieren von zusätzlichem Gewicht im Kopf das Regelverhalten verbessert. Auch die Positionierung des MPU6050 Sensors spielt eine entscheidende Rolle – je höher er platziert ist, desto genauer arbeitet die Regelung. Für zukünftige Projekte ziehe ich in Betracht, auf einen Teensy 4.0 oder 4.1 Mikrocontroller umzusteigen. Diese bieten eine schnellere Datenverarbeitung, wodurch alle Hallsensoren effizient eingebunden werden können. Zudem ist es wichtig, das Gewicht gleichmäßig auf der Bodenplatte zu verteilen, um ein Kippen nach vorne oder hinten zu vermeiden.
Aktuell ist das Projekt auf Eis gelegt, da ich mich nun auf den Bau von Weihnachtsgeschenken und die Konstruktion eines Solar-Rennautos konzentriere. Mehr dazu wird es bald hier im Blog geben! Ich plane jedoch, den Robotergeist im nächsten Sommer weiterzuentwickeln und die gewonnenen Erkenntnisse umzusetzen.
Abschließend kann ich sagen, dass dieses Upcycling-Projekt trotz der Schwierigkeiten eine bereichernde Erfahrung war. Es zeigt, wie man mit Kreativität und technischem Know-how aus alten Geräten etwas Neues und Spannendes schaffen kann. Ich hoffe, meine Erfahrungen inspirieren euch zu eigenen DIY-Projekten und ihr habt genauso viel Freude daran wie ich.
Wenn ihr Fragen habt oder eure eigenen Erfahrungen teilen möchtet, schreibt es gerne in die Kommentare. Ich freue mich auf den Austausch mit euch!
Zusammenfassung der diesjährigen Rennsaison der Formel-S
Die diesjährige Rennsaison der Formel-S war trotz begrenzter Rennen aufregend und lehrreich. Leider fanden in diesem Jahr nur zwei offene Rennen statt: der Solarcup Wil am 25. Juni in Wil und der Solarcup Seeland am 15. Juli in Brügg.
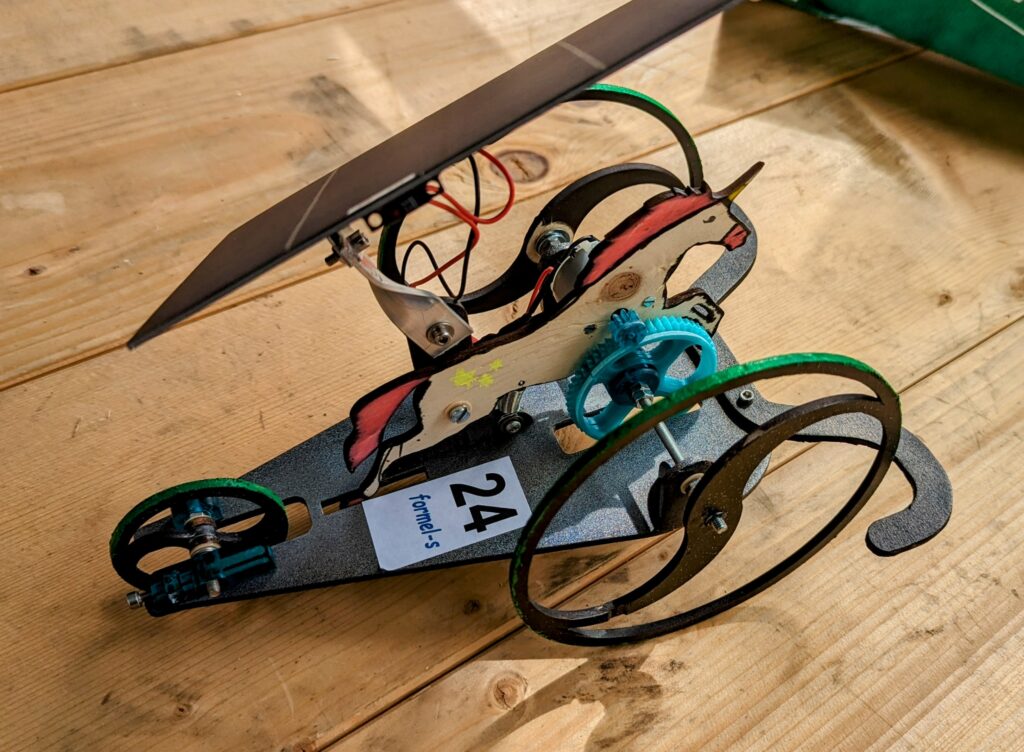
Unsere Teilnahme mit dem Unicorn V2
Wir traten bei beiden Rennen mit unserem Fahrzeug, dem Unicorn V2, an und konnten sowohl in Wil als auch in Brügg den zweiten Platz im Schönheitswettbewerb gewinnen! In Wil wurde dieser Preis durch eine Zuschauerbefragung ermittelt, während in Brügg eine Jury die Entscheidung traf.
Solarcup Wil
Da wir bereits im Vorjahr am Solarcup Wil teilgenommen hatten, waren wir mit dem Prozedere vor Ort vertraut. Anmeldung, Registrierung, Rennablauf und Start waren uns bekannt, was uns einen gewissen Vorteil verschaffte.
Solarcup Seeland in Brügg
Der Solarcup Seeland in Brügg war für uns eine neue Erfahrung. Überraschend war vor allem der Turnierablauf: Es gab Gruppierungen und im Anschluss ein Knockout-System. Besonders ungewöhnlich war die Startmethode: Die Fahrzeuge wurden eingeschaltet und die angetriebene Achse frei in der Luft gehalten. Beim Startsignal wurde die Achse einfach fallen gelassen. In Wil gibt es hingegen eine spezielle Startvorrichtung, in der die Wagen eingestellt werden. Auf diese Besonderheit müssen wir uns im nächsten Jahr besser vorbereiten.
Herausforderungen und Erfolge
Unser Unicorn V2 war primär darauf ausgelegt, den Schönheitspreis zu gewinnen, was uns auch gelungen ist. Leider hatten wir bei den Rennen selbst keinen Erfolg, da technische Probleme auftraten. Trotz dieser Herausforderungen hatten wir viel Spaß und konnten zahlreiche Ideen für das Unicorn V3 sammeln, das in der Saison 2025 an den Start gehen wird.
Begleite uns auf unserer Reise
Wenn ihr Lust habt, könnt ihr mich hier auf dem Blog, bei Twitch, eventuell auch auf YouTube und ganz sicher bei Instagram beim Entwicklungsprozess begleiten.
Bis dahin: Let’s Build Things! 😛
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Dauer
Beschreibung
cookielawinfo-checbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.