
Hey zusammen!
Ich möchte euch von meinem neuesten DIY-Projekt erzählen: dem Bau eines selbstbalancierenden Robotergeists aus einem alten Hoverboard. Dieses Upcycling-Projekt ist perfekt für alle Technikbegeisterten, die sich inspirieren lassen wollen und Spaß daran haben, alten Dingen neues Leben einzuhauchen.
Alles begann damit, dass ich ein altes Hoverboard zerlegt habe. Die Motoren und der Akku waren ideal für mein Vorhaben. Die restliche Elektronik habe ich sicher eingelagert – man weiß ja nie, wann man sie wieder gebrauchen kann. Mit Fusion 360 habe ich das Design für den Robotergeist erstellt. Das CAD-Programm ermöglichte es mir, sowohl das Gehäuse als auch den Kopf des Geists genau nach meinen Vorstellungen zu gestalten.

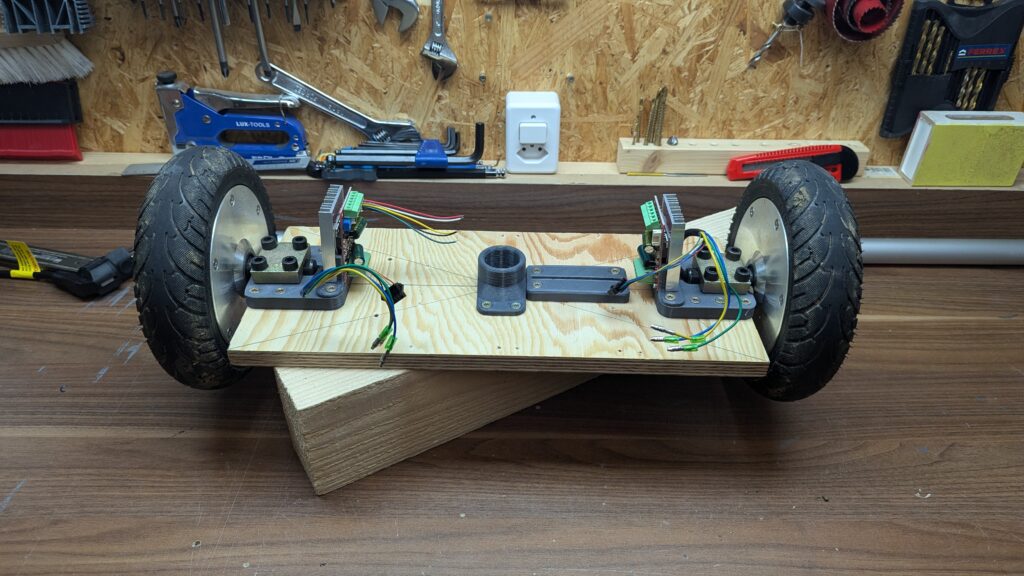

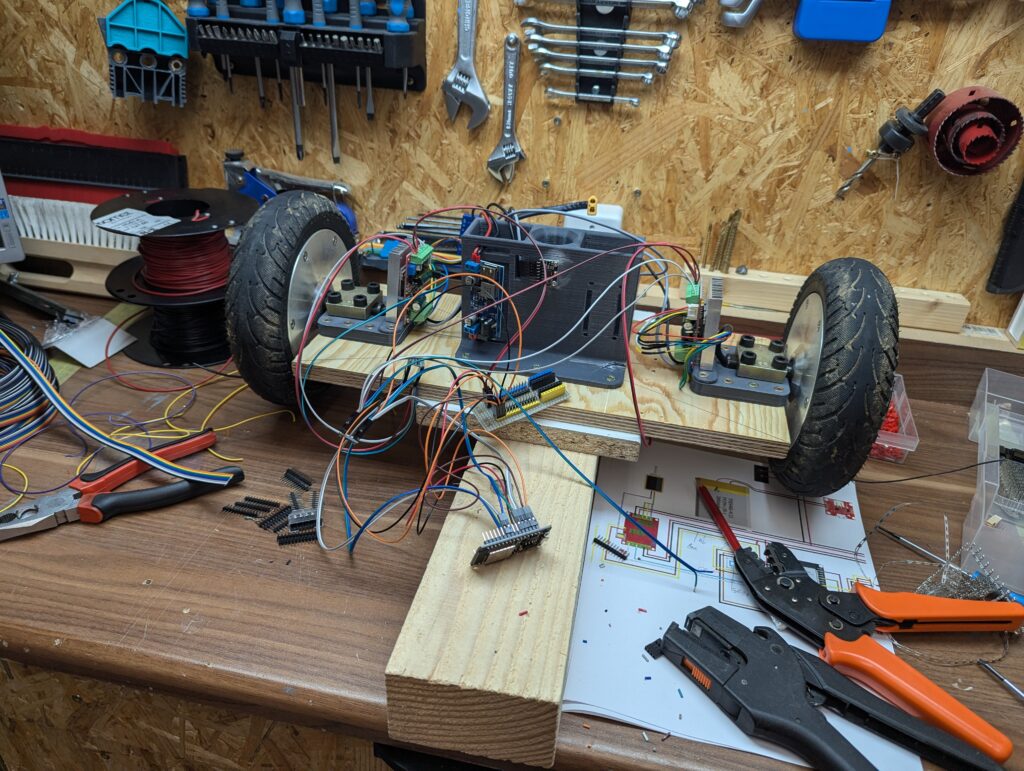
Die gedruckten Teile aus PETG-Filament habe ich mit meinem FDM-3D-Drucker hergestellt. PETG ist robust und eignet sich hervorragend für Projekte, die Stabilität erfordern. Mit Hilfe von Holzbearbeitungswerkzeugen habe ich zusätzliche Anpassungen vorgenommen und alle Teile zusammengefügt. Die Verkabelung der Komponenten, darunter der ESP32 Mikrocontroller, der MPU6050 Sensor und der ZS-X11H V1 Motortreiber, war der nächste Schritt. Ein 3.3V zu 5V Level Shifter kam zum Einsatz, um die unterschiedlichen Spannungsanforderungen der Bauteile zu berücksichtigen.
Die ersten Tests verliefen nicht ohne Probleme. Beim initialen Versuch habe ich zwei Motortreiber zerstört – ein klassischer Fall von „Versuch und Irrtum“. Doch davon ließ ich mich nicht entmutigen. Ich überarbeitete die 3D-Modelle, druckte einige Teile neu und passte die Konstruktion an. Mit Visual Studio Code und PlatformIO begann ich, die Software für den Roboter zu entwickeln. Ziel war es, dass der Robotergeist selbstständig das Gleichgewicht hält und eventuell sogar gesteuert werden kann.
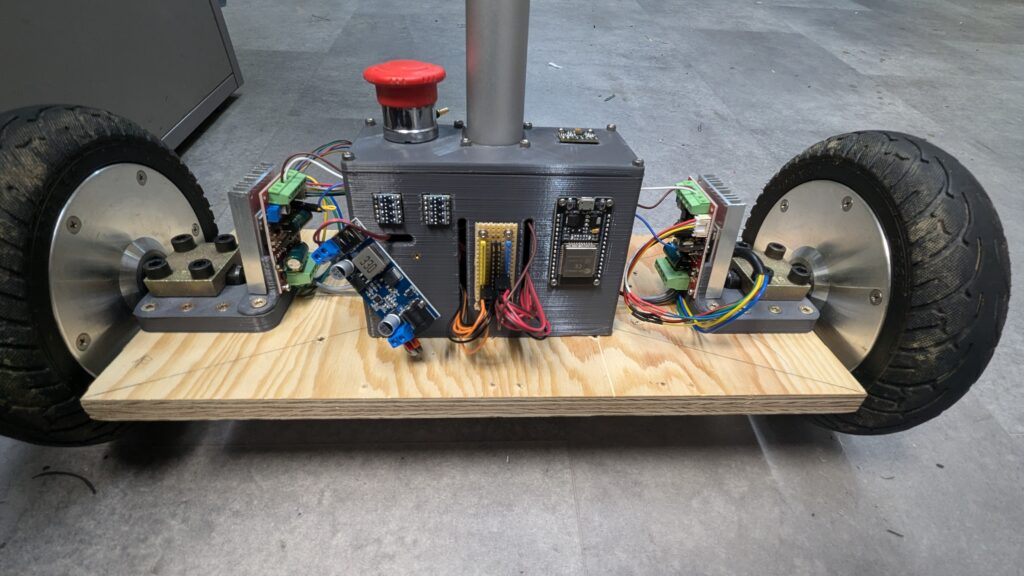
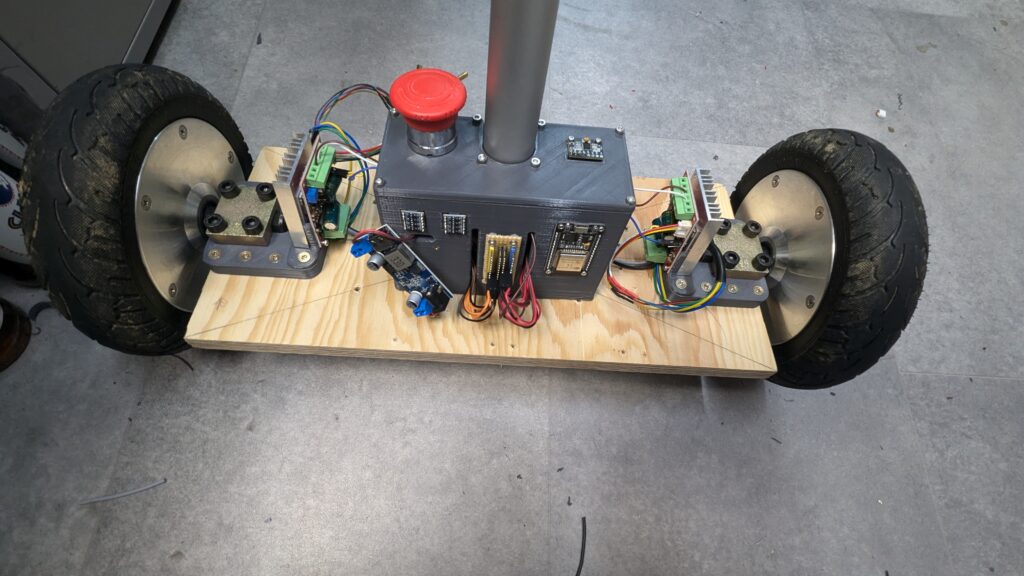

Der Kopf des Geists, ebenfalls in Fusion 360 entworfen und gedruckt, verleiht dem Roboter nicht nur sein charakteristisches Aussehen, sondern dient auch als zusätzliches Gewicht für ein besseres Balancieren. Nach einigen Anpassungen und Optimierungen balancierte der Roboter tatsächlich recht gut. Die Freude war groß, doch zwei Tage vor Halloween kam der nächste Rückschlag: Beim Einbinden der Hallsensoren in den Regelkreis ging aus ungeklärter Ursache ein Motortreiber kaputt. Ersatzteile hatten eine Lieferzeit von vier bis sechs Wochen, sodass das Projekt für Halloween leider nicht mehr fertiggestellt werden konnte.
https://www.instagram.com/reel/DBpLelJtG6v/?utm_source=ig_web_copy_link&igsh=MzRlODBiNWFlZA== VIDEO AUF INSTA
Trotz dieser Hindernisse habe ich viel aus dem Projekt gelernt. Ich habe festgestellt, dass das Platzieren von zusätzlichem Gewicht im Kopf das Regelverhalten verbessert. Auch die Positionierung des MPU6050 Sensors spielt eine entscheidende Rolle – je höher er platziert ist, desto genauer arbeitet die Regelung. Für zukünftige Projekte ziehe ich in Betracht, auf einen Teensy 4.0 oder 4.1 Mikrocontroller umzusteigen. Diese bieten eine schnellere Datenverarbeitung, wodurch alle Hallsensoren effizient eingebunden werden können. Zudem ist es wichtig, das Gewicht gleichmäßig auf der Bodenplatte zu verteilen, um ein Kippen nach vorne oder hinten zu vermeiden.
Aktuell ist das Projekt auf Eis gelegt, da ich mich nun auf den Bau von Weihnachtsgeschenken und die Konstruktion eines Solar-Rennautos konzentriere. Mehr dazu wird es bald hier im Blog geben! Ich plane jedoch, den Robotergeist im nächsten Sommer weiterzuentwickeln und die gewonnenen Erkenntnisse umzusetzen.
Abschließend kann ich sagen, dass dieses Upcycling-Projekt trotz der Schwierigkeiten eine bereichernde Erfahrung war. Es zeigt, wie man mit Kreativität und technischem Know-how aus alten Geräten etwas Neues und Spannendes schaffen kann. Ich hoffe, meine Erfahrungen inspirieren euch zu eigenen DIY-Projekten und ihr habt genauso viel Freude daran wie ich.
Wenn ihr Fragen habt oder eure eigenen Erfahrungen teilen möchtet, schreibt es gerne in die Kommentare. Ich freue mich auf den Austausch mit euch!
Bis zum nächsten Mal und bleibt kreativ!